
The most innovative new feature of the Mini 4 Pro is Active Track 360, a revolutionary upgrade for dynamic tracking with a drone. A dial with two rings controls the rotation of the aircraft around the target with two sets of values for distance and altitude
After a recent update, this feature has been further updated
In this video, I will show you how to use the new version named Active Shots to follow people, cars, cycles, boats, and so on in a very dynamic way
Other related articles about the Mini 4 Pro:
- Video Quality
- Mini 4 Pro vs Mini 3 Pro video quality
- Mini 4 Pro Obstacle Avoidance System
- Waypoints
- MasterShots
- QuickShots
- Camera Settings for Video
- Color profiles: Normal vs D-Log M vs HLG
If you prefer to watch this as a video, you will find my YouTube version at the end of this one
Tracking with a Drone
The Mini 4 Pro has three tools for tracking grouped under the name Focus Track:
- Spotlight
- Active Track (or should I say Active Shots)
- Point of Interest, with minimal tracking capabilities
With previous DJI models, I use Active Track for autonomous tracking, in other words when I cannot use the remote control because I am the target while driving, walking, cycling, on a boat, and so on
When I am tracking other targets and I can freely use the controller, my favorite tool is Spotlight, as it allows all sorts of movements while keeping the target in the middle of the frame
But the new Active Track 360 is so powerful that I will use this function even more
Mini 3 Pro
In the Mini 3 Pro, Active Track is implemented in a relatively basic way. There are two modes available:
- In Trace mode, the drone follows the target from behind or from the front at a constant distance and height. It is also possible to have the drone on top of the target with the camera facing down for top-down tracking
- Parallel mode is used for tracking the target from a side, although not exactly at 90° for safety reasons, as this model is not supplied with omnidirectional obstacle avoidance
So, when tracking without the use of the remote controller the options are rather limited.
Mavic 3
The Mavic 3 has a more advanced implementation of Active Track, as it is possible to select from a circular interface eight different positions compared to the drone’s position
It is certainly an improvement, but the tracking will still be quite static when the remote controller is not used
The Mini 4 Pro introduces a much more dynamic approach to autonomous tracking
Note that Active Track 360 has recently been added to the Air 3, but it is not as yet available on the different versions of the Mavic 3
Active Shots Settings
In the Safety tab of Settings we set the Obstacle Avoidance Action to Bypass to take advantage of the omnidirectional obstacle detection, another major upgrade of the Mini 4 Pro compared to previous lightweight models
This will ensure added safety, although some caution is still needed in case of obstacles hard to detect, like wiry tree branches and electric lines

With Active Shots, we can select the same Resolution and Frame Rates as for regular video
All three Color Profiles are available, Normal, D-Log M, and HLG, and this is great news
We enter the three modes of Focus Track by drawing a rectangle around a target
An easier way, especially for a target already in motion, is to select Subject Scanning in the Safety tab of the Settings
Now people and vehicles are recognized as potential targets by a plus sign above them. A target is selected by tapping on the plus sign.
A window will open with the three Focus Track modes. Active Shots is the one on the left. After choosing it and hitting go, we are presented with three choices:
- Auto
- Manual
- Parallel
Manual Mode
After choosing myself as a target, selecting Manual, and hitting Go, on the lower left part of the screen, a window appears with a double dial
In the center, there is an icon of a person walking facing the front, it represents the position of the target
Using the Inner Ring

Behind the target, in the inner ring, is a small circle with an arrow representing the position from where the drone will be tracking. This means that by default the tracking position is behind the target
If I start walking, the drone computes my position and then moves behind me. If I move to a side or turn completely around, it will pivot and turn around me until it is positioned behind me, as this is the position of the target indicated in the ring
In manual mode, the aircraft tracks relative to the position of the target
Now I walk in a straight line and I don’t find being tracked from behind very exciting, so I prefer to place the drone to my left side, at 9 o’clock
I slide the cursor with a finger to the left until 9 o’clock. After a few seconds, the drone will turn to my left
Once again the position of the aircraft is relative to my direction, so if I change direction, it will adjust its position until it is again to my left
I can choose on the dial any positions for the drone, by moving the little icon, to the front, right, or anywhere in between
Notice that when the drone moves to assume the new position, the ring shows a green line describing the move
Using Both Rings
When following a person it is possible to use a second ring, the outer one
By going to Settings through the three dots at the top right of the Screen, we can select the Control tab where, below Subject Scanning, we can choose SmarthShots Settings
A window will open to customize the use of the two rings. There are two different modes: one for Person and another one for Vehicle.
In Persons mode both rings are available. The inner one is for closer distance and lower altitude, the outer one is for farther away and higher up
Below there is a segment with two cursors to set the distance the drone will keep from the target, the left cursor is for the inner ring, and the right cursor is for the outer one
Let’s start by setting it at the extreme values which are a minimum distance of 4 meters or 12 feet and a maximum of 15 meters
Then we can specify the altitude of the flight, let’s choose the minimum value for the inner and the maximum value for the outer ring
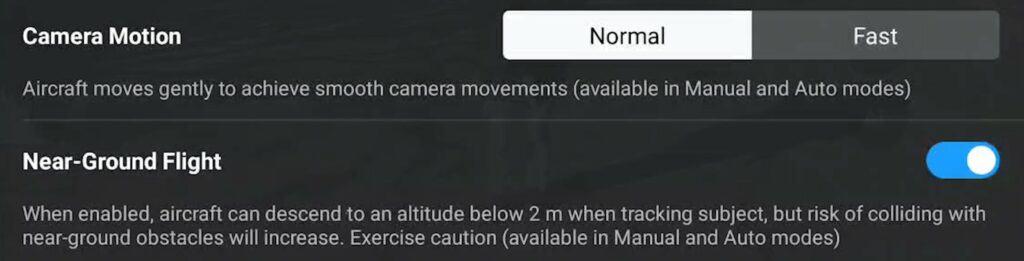
We can set the movement of the camera to Normal or Fast, let’s keep it to Normal
Finally, it is possible to select Near-ground Flight to have the aircraft at less than 2 meters for quite spectacular tracking, although for safety reasons should only be used with even terrain without slopes or tall grass
We can now go back to the Manual tracking to see how the integration between the two rings works
I have set extreme values for distance and height to make the effect more dramatic, even though in real life I prefer a subtle difference between the values
I set the drone to track me from behind on the inner ring and then I swipe with a finger to place it above and slightly to the right on the outer ring
Now let’s select some more subtle values in the settings and try again
Using Manual mode it is possible to track in a much more dynamic way, opening new ways for vlogging, music clips, and other uses for videography
I wish it would be possible to fine-tune the rotation speed so that the whole transition lasts for 15-20 seconds, which would be ideal for short clips
Parallel Mode
The Mode Parallel works in a much simpler way
Once we set a direction for tracking, let’s say with the aircraft facing East, it will continue to track the subject while always facing the same geographical direction, regardless of the movement of the target
It is a very useful mode when we want to maintain the same background, although the name Parallel in my opinion is not appropriate, it should be rather named fixed or locked direction
Auto Mode
Finally, in Auto mode, the drone performs a series of specified moves similar to QuickShots while tracking the target
Even though we cannot control the movement, useful results can be easily achieved
Vehicle vs Person
When the target is recognized as a vehicle, we only have the inner ring available, I don’t know why, probably for safety issues
I hope it is only temporary, as it would be very effective to have the same functionality as for Person
Possible Improvements
The new Active Track, or Active Shots is a major step forward for prosumer drones
As often is the case for a new feature, it still needs a couple of refinements:
- Control of the speed of the rotation around the target, with a much slower minimum value
- Extend the controls for Vehicles to match the ones for Persons
- There is a tendency to lose the target in Normal mode in medium to strong winds, while Parallel and Auto work much better